 جستجوگر اخبار مطالب و تسلیحات نظامی جمع آوری مطالب نظامی و تسلیحات
جستجوگر اخبار مطالب و تسلیحات نظامی جمع آوری مطالب نظامی و تسلیحات
نوشته شده توسط: محمد مهدی جمیل صفت
تمامی موشک های مورد استفاده در ارتش های جهان در انواع مختلف از جمله کروز و بالستیک دارای یک جزء کوچک بانام سیستم ناوبری اینرسیایی هستند. درواقع سیستم اینرسیایی یک سیستم هدایت داخلی موشک محسوب میشود و تنها با اطلاعات و مختصات از قبل داده شده به موشک اقدام به مسیر یابی و پرواز به سمت هدف میکند.همانطور که اشاره کردیم سیستم ناوبری اینرسیایی(INS) یک سیستم هدایت داخلی و بدون نیاز به دخالت ابزار هایی همچون ماهواره ها در هدایت موشک است ، هر چند که در صورت نیاز به دقت بالا میتوان از داده های ماهواره های نظامی به عنوان یک مکمل برای سیستم هدایت اینرسیایی بهره برد بدین شکل که پس از آنکه سیستم اینرسیایی موفق به موقعیت یابی و تصیح مسیر موشک شد ، داده های استخراجی توسط این سیستم در کامپیوتر موشک با داده های دریافت شده از ماهواره تطابق داده میشود و بدین شکل دقت موشک افزایش یافته و با دقت بیشتری به سمت هدف پرواز میکند. در واقع امکان استفاده از سیستم هدایت اینرسیایی به تنهایی وجود دارد اما امکان استفاده از سیستم هدایت ماهواره ای به تنهایی وجود ندارد و سیستم هدایت ماهواره ای به عنوان یک مکمکل برای سیستم هدایت اینرسیایی شناخته میشود. تنها کاربرد سیستم اینرسیایی به موشک ها نمیشود بلکه در تمامی وسابل نقلیه امکان کاربرد آن وجود دارد.
سیستم ناوبری اینرسیایی (به انگلیسی: Inertia Navigation system) دارای چند جزء است که مهمترین آن ژیروسکوپ (Gyroscope) یا چرخش نما نام دارد. ژیروسکوپ ها دارای مدل های مختلفی از جمله : ژیروسکوپ های چرخشی، ژیروسکوپ های حلقه لیزری ، ژیروسکوپ های فیبر نوری و ژیروسکوپ های MEMS هستند. علاوه بر ژیروسکوپ ها ، سیستم هدایت اینرسیایی از چند شتاب سنج و قطب نمای الکترومغناطیس استفاده میکند که در ادامه و بعد از معرفی کامل انواع ژیروسکوپ ها به سراغ معرفی انواع شتاب سنج ها و قطب نماهای مغناطیسی خواهیم رفت و در آخر نیز در خصوص کاربرد سیستم اینرسیایی در وسایل مختلف (به خصوص موشک های بالستیک) مبحثی خواهیم داشت.
ژیروسکوپ ها
ژیروسکوپ های چرخشی:
این ژیروسکوپ ها جزو اولین ژیروسکوپ های ساخت بشر هستند و سابقه ی طولانی در خدمت به بشریت در ناوبری وسایل مختلف داشته اند که البته امروزه با وجود ساخته شدن ژیروسکوپ های جدید و با حساسیت بالا نسبت به ژیروسکوپ های چرخشی دیگر از چنین ژیروسکوپ هایی استفاده نمیشود. این ژیروسکوپ ها از یک اصل ساده پیروی میکنند که آن هم اندازه گیری اختلاف چرخش جسم در 6 درجه ی آزاد اصلی است. به طورکلی ما 3 درجه ی آزاد اصلی داریم که به محور های X و Y و Z معروف هستند و از این 3 درجه ی اصلی ، 3 درجه ی دیگر نیز مشتق میشوند که یاو ، پیچ و رول نام دارند.
به طور کل تمامی ژیروسکوپ دو وظیفه دارند :
1-تعین موقعیت شمال جغرافیایی (در مبحث قطب نماهای مغناطیسی بیشتر توضیح داده میشود)
2-تعین میزان دقیق غلط موشک و انحراف موشک به زوایا ی مختلف
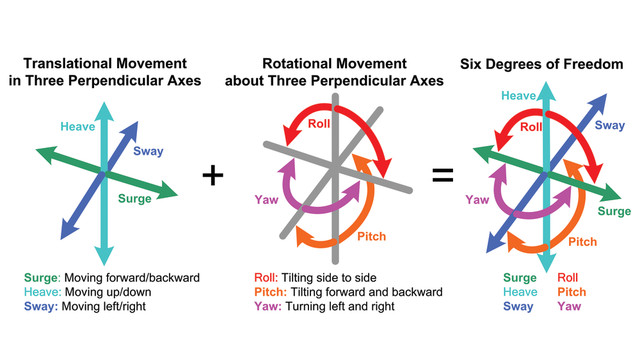
در تصویر فوق 6 درجه ی آزاد اصلی را که مبنای کار ژیروسکوپ ها هستند را مشاهده میکنیم

یک ژیروسکوپ چرخشی
یک gif که به خوبی حرکت یک ژیروسکوپ چرخشی را به تمامی جهات به نمایش میگذارد
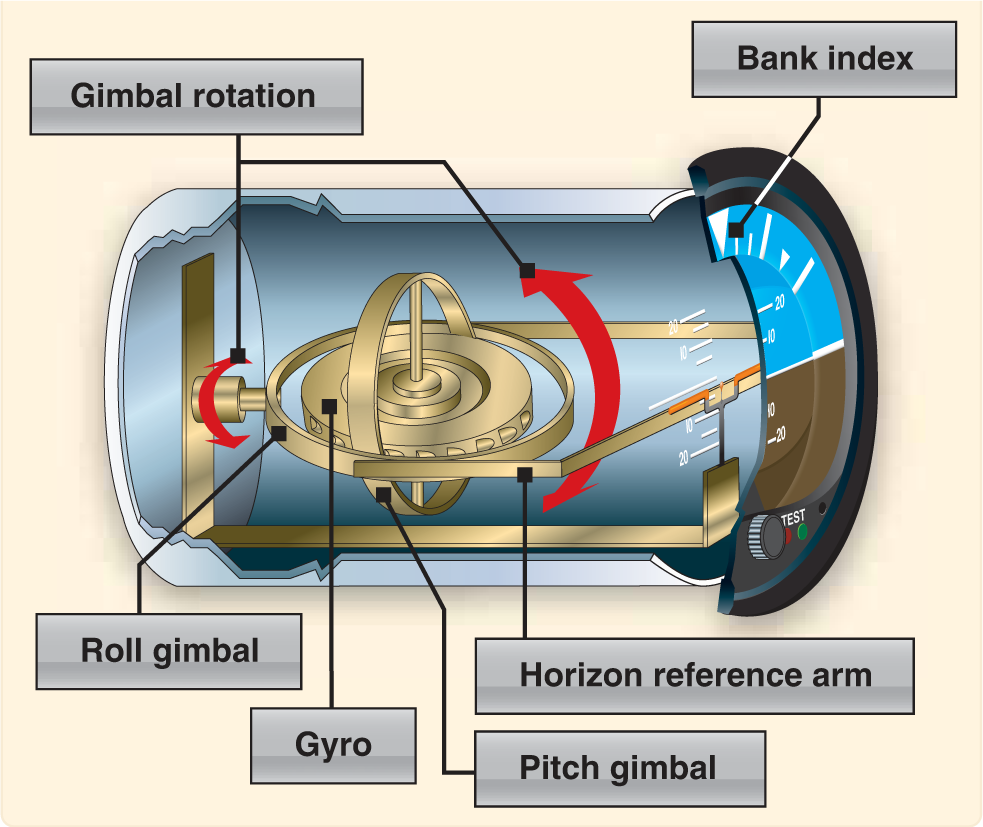
کاربرد ژیروسکوپ های چرخشی در نشانگر هواپیما
ژیروسکوپ های چرخشی از اولین ژیروسکوپ های ساخت بشر هستند و از اصول اصول کاری بسیار ساده ای پیروی میکنند به همین ساخت و تعمیر آن ها بسیار آسان است ، همچنین قیمت پایین تری نیز دارند و جایگزینی آنان بسیار آسان است اما مشکل این ژیروسکوپ ها دقت پایین آنها مخصوصا هنگام چرخش با سرعت بالا است که باعث تحت تاثیر قرار دادن دقت مجاسبات شتاب سنج ها نیز میشود.(این قسمت در مبحث مربوط به شتاب سنج ها توضیح داده خواهد شد)
ژیروسکوپ های حلقه لیزری :
نسل دوم ژیروسکوپ ها ، ژیروسکوپ های حلقه لیزری (Ring laser gyroscope) هستد ، این ژیروسکوپ به منظور پر کردن خلا ژیروسکوپ های چرخشی یعنی عدم داشتن دقت کافی مخصوصا در سرعت های بالا ساخته شده اند و به دلیل استفاده از پرتو لیزر دقت بیشتری نسبت به ژیروسکوپ های چرخشی دارند. ژیروسکوپ های حلقه لیزری فاقد هرگونه قطعه ی مکانیکی چرخان هستند ، به همین دلیل نسبت به ژیروسکوپ های چرخشی کوچک تر و سبک تر هستند. دلیل دقت بیشتر ژیروسکوپ های حلقه لیزری در اندازه گیری پارامتر های زاویه در جهات مختلف نسبت به ژیروسکوپ های چرخشی ، استفاده از پرتوی جامد لیزرهای کریستالی است که حتی در سرعت های بالا و با تکان های فراوان تنها با تابانده شدن بر روی یک آینه اقدام به اندازه گیری پارامتر های مد نظر میکنند ولی ژیروسکوپ های چرخشی به تکان و سرعت بالا حساس بوده و دقت اندازه گیری آن ها نیز پایین می آید. ژیروسکوپ های حلقه لیزری به شکل حلقه و یا مثلث ساخته میشوند و درون آنها پرتوی لیزر با تابنده شدن بر روی چند آینه درون ژیروسکوپ میچرخد و سپس به یک سنسور خوانده ی لیزر برخورد میکند که اطلاعات را پردازشگر خود ژیروسکوپ فرستاده و پردازشگر ژیروسکوپ نیز پارامتر های مورد نیاز را به شکل سیگنال هایی دیجیتال به کامپیوتر وسیله ی نقلیه میفرستد.
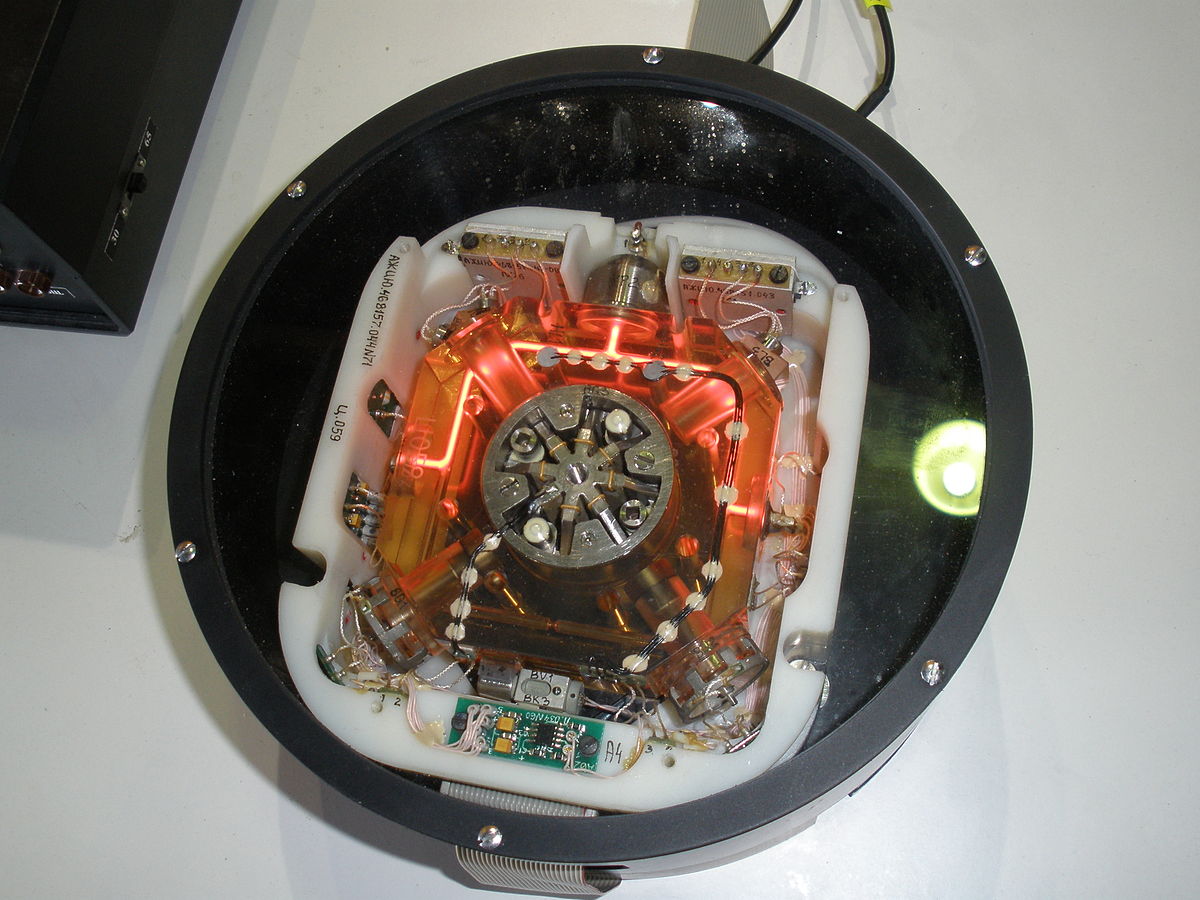
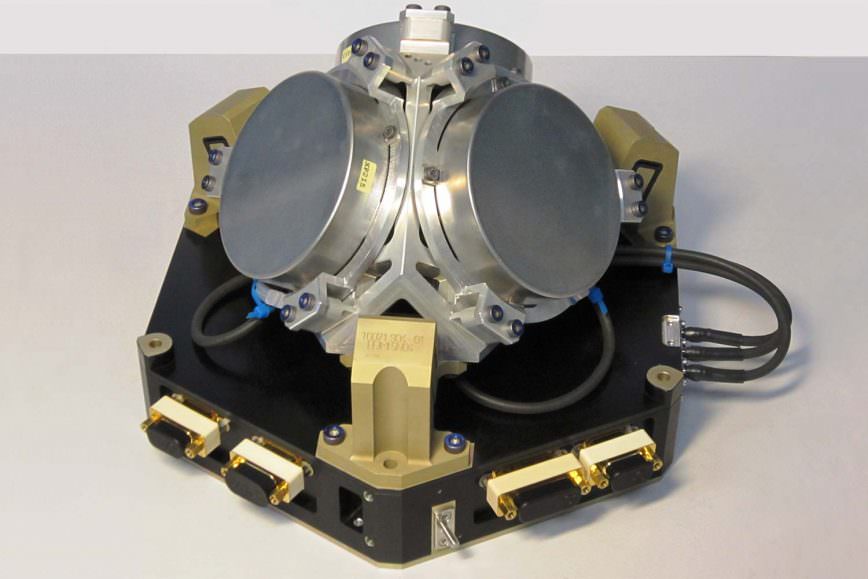
درون یک ژیروسکوپ حلقه لیزری
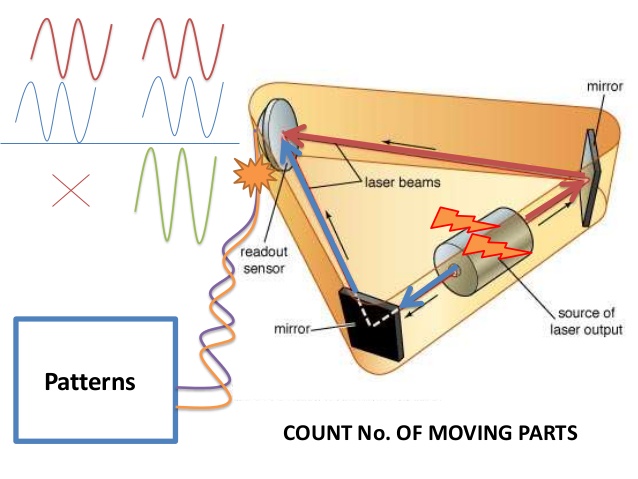
طرز کار ژیروسکوپ حلقه لیزری
در عکس فوق لیزر در دو مسیر جدا از مبداء خود (Source of laser output) تابانده میشود و دو پرتوی لیزر به صورت همزمان به آینه برخورد کرده و پس از برخود به آینه به سمت حسگر خواننده ی لیزر یعنی Readout sensor هدایت میشوند ، این حسگر اطلاعات مورد نیازرا به شکل الگوهایی با سیگنال مشخص به سمت پردازنده ی ژیروسکوپ میفرستند و از آنجا نیز اطلاعات با فرمت از قبل مشخص شده به سمت کامپیوتر مرکزی وسیله ی نقلیه و یا موشک فرستاده میشود. مراحل فوق که در ژیروسکوپ حلقه لیزری اساس کار است ، به زبان ساده اصل سایناک نامیده میشود که بر اندازه گیری اختلاف فازی بین پرتوهای نور و یا لیزر تاکید دارد.
ژیروسکوپ های فیبر نوری :
پس از اثبات کارایی اصل سایناک در ژیروسکوپ های حلقه لیزری ، نسل سوم ژیروسکوپ ها یعنی ژیروسکوپ های فیبر نوری(Fibre optical gyroscope) ساخته شدند. مهم ترین اشکال ژیروسکوپ های حلقه لیزری در تاثیرگرما و عوامل محیطی بر روی خروجی لیزر بود که باعث میشد پس از طی مسیر در صورت وجود داشتن گرمای بالا(درموشک های بالستیک و شاتل فضایی) و یا عوامل محیطی همچون شرجی هوا(در کشتی ها) عملکرد خروجی لیزر که وظیفه ی تاباندن لیزر را دارد تحت ثاثیر عوامل ذکر شده ضعیف شده و پرتوی لیزر ضعیف به حسگر خواننده ی لیزر برسد که در این صورت دقت اندازه گیری ژیروسکوپ بسیار پایین خواهد آمد ، به همین دلیل در ژیروسکوپ های فیبر نوری از پرتوی نور و کابل های فیبر نوری استفاده میشود. در ژیروسکوپ های فیبر نوری کابل های فیبر نوری مقدار کمی بسته به سرعت متغیر چرخشش دارند ، هنگامی که خروجی پرتو اقدام به تاباندن پرتو میکند این پرتو با اختلاف چرخش نسبت به کابل فیبر نوری مسیر را طی میکند و حسگر خواننده نیز پرتوی نور را دریافت کرده و به شکل سیگنال هایی با الگو های مشخص به پردازنده ی ژیروسکوپ میفرستد که در آنجا متغیر های مورد نیاز طبق اصل سایناک بدست می آید و به کامپیوتر اصلی وسیله ی نقلیه فرستاده میشود.
یک ژیروسکوپ فیبر نوری
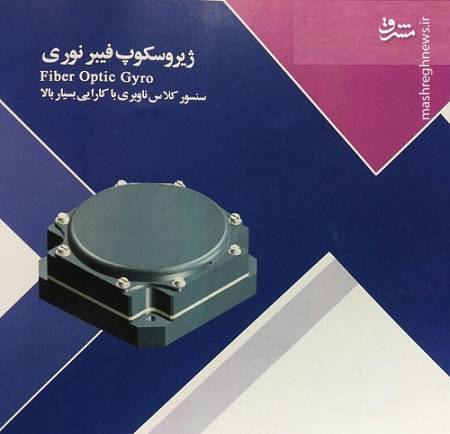
ژیروسکوپ فیبر نوری ساخت ایران
ژیروسکوپ های MEMS :
ژیروسکوپ های MEMS درواقع لبه ی تکنولوژی بشر در ساخت سنسور های ناوبری است. این ژیروسکوپ ها اندازه ی بسیار کوچکی دارند و نه تنها در موشک های بالستیک و کروز بلکه در وسایل بسیار کوچک نیز کاربرد دارند و دارای دقت بسیار بالایی نیز هستند ، کاربرد اصلی این ژیروسکوپ ها در وسایلی همچون عینک های واقعیت مجازی ، گوشی ها و… است . درون این ژیروسکوپ ها یک ساچمه ی نوسان کننده است که پس از چرخش به یک جسم نوسان کننده برخورد میکند که سیگنالی را پردازنده ی ژیروسکوپ میفرستد و پس از تقویت این سیگنال ، مقادیر مورد نیاز به کامپیوتر اصلی موشک ، وسیله ی نقلیه و یا گوشی فرستاده میشود.
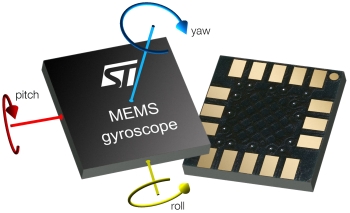
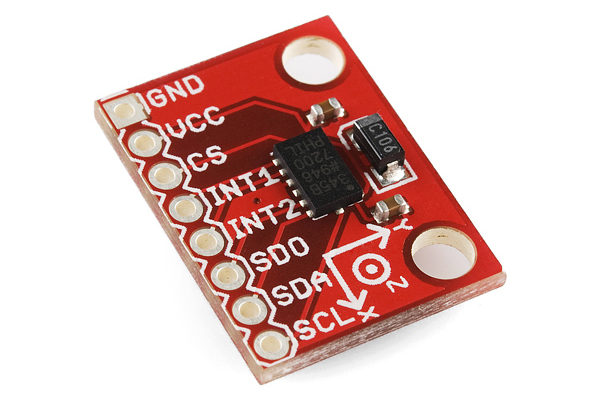
یک ژیروسکوپ MEMS و 3 درجه ی آزادی یاو ، پیچ و رول

یک ژیروسکوپ MEMS و اندازه ی بسیار کوچک آن
کاربرد ژیروسکوپ های MEMS در کنترل های تلوزیون های اسمارت

کاربرد ژیروسکوپ های MEMS در عینک های واقعیت مجازی
ژیروسکوپ ها در وسایل نقلیه متفاوتی مانند هواپیماها ، جنگنده ها ، کشتی ها ، انواع موشک ها اعمم از بالستیک و کروز و… کاربرد دارد و بالطبع بشر به دلیل کاربرد گسترده ی این سنسور ها اقدام به ساخت انواع مختلفی از آن ها با حساسیت های گوناگون کرده است.
سنسور های شتاب سنج :
شتاب سنج (Accelerometer) وسیله ای است که مقدار صحیح شتاب جسم را محاسبه میکند و پارامتر خواسته شده را بر حسب متر بر مجذور ثانیه یا واحد نیروی گرانش (G) بدست می آورد. بدست آوردن صحیح شتاب تاثیر زیادی در کاهش دایره ی خطای موشک بالستیک (CEP) دارد. سنسور های شتاب سنج نیز در وسایل مختلف اعمم از موشک ها و هواپیما ها و گوشی های تلفن همراه کاربرد دارند. عملکرد این سنسور ها به عملکرد سنسور های MEMS شباهت دارد ، بدین شکل که یک ساچمه ی کوچک به یک نوسان کننده برخورد میکند و نوسان کننده نیز بر حسب مقدار نوسان شتاب جسم را بدست می آورد ، البته نوع ژیروسکوپ در محل نصب شتاب سنج نیز تاثیر دارد.
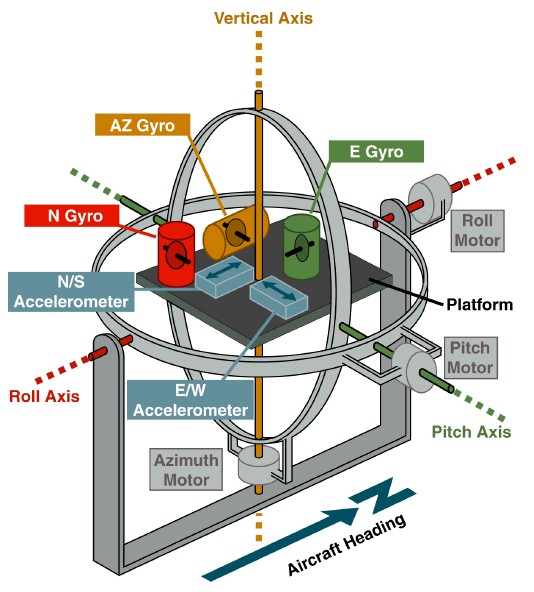
در سیستم هایی اینرسیایی که از ژیروسکوپ های چرخشی بهره می برند ، سنور های شتاب سنج شمال به جنوب (Accelerometer N/S) و شرق به غرب(Accelerometer E/W) درست بر روی گیمبال ژیروسکوپ نصب میشوند.(مانند تصویر زیر)
اما در صورت استفاده از ژیروسکوپ های حلقه لیزری ، فیبر نوری و MEMS سنسور شتاب سنج با کمی فاصله از ژیروسکوپ نصب میشود. در تصاویر زیر میتوانید سنسور شتاب سنج سه محوره و دو محوره را مشاهده کنید.
سنسور شتاب سنج سه محوره
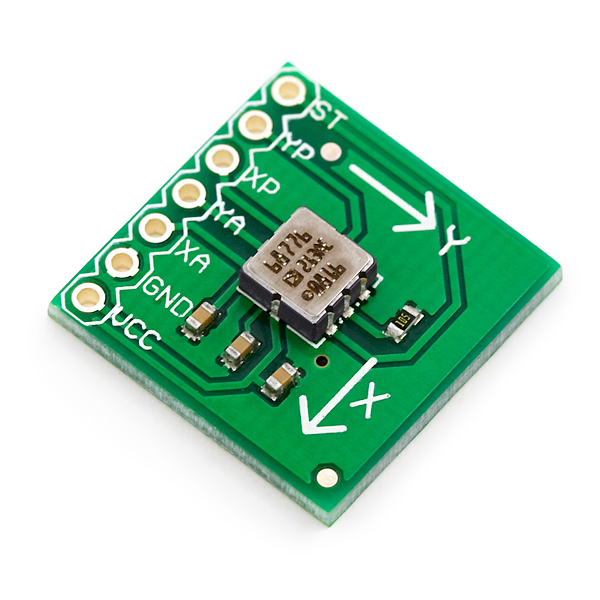
سنسور شتاب سنج دو محور
قطب نماهای مغناطیسی :
موشک های بالستیک برای تعین موقعیت خود علاوه بر ژیروسکوپ و سنسور شتاب سنج احتیاج به قطب نما مغناطیسی نیز دارند که بر اساس میدان مغناطیسی زمین میتواند جهت شمال مغناطیسی را مشخص کند. شمال مغناطیسی با شمال جغرافیایی بسیار متفاوت است ، در حقیقت شمال جغرافیایی همان قطب های شمال (و ایضا جنوب) زمین هستند که مکان آن ها ثابت است ولی شمال مغناطیسی زمین(و ایضا جنوب مغناطیسی زمین) که میدان مغناطیسی زمین را مشخص میکند چند درجه با شمال جغرافیایی فاصله دارد. پس بنابر این قطب نماهای مغناطیسی استفاده شده در موشک های بالستیک نشان دهنده ی شمال مغناطیسی هستند اما برای ناوبری و گرا دادن دقیق به موشک ، کامپیوتر موشک احتیاج به داشتن مختصات دقیق شمال جغرافیایی نیز دارد ، نکته جالب این است که میتوان از داده های استخراجی ژیروسکوپ موشک ، محل شمال جغرافیایی را نیز مشخص کرد ، در واقع کامپیوتر موشک از ژیروسکوپ در نقش قطب نما برای یافتن محل شمال جغرافیایی و از قب نماهای مغناطیسی برای یافتن شمال مغناطیسی استفاده می کند.
قطب نماهای مغناطیسی مورد استفاده در موشک های بالستیک از چند دور سیم پیچ به هم پیوسته استفاده میکنند. این سیم پیج به میدان مغناطیسی زمین حساس بوده و از آنجا که قطب نما نسبت به موشک در جای ثابتی نصب شده هرگونه تغیر مسیر و ضعیف یا قوی شدن میدان مغناطیسی به شکل سیگنال هایی به پردازنده ارسال میکند که در آنجا این سیگنال ها به تقویت شده و به فرمت دیجیتال تبدیل میشوند و سپس به کامپیوتر مرکزی ارسال میشوند.
یک قطب نمای مغناطیسی
نحوه ی کار سیستم ناوبری اینرسیایی :
پس از آشنایی با اجزای سیستم ناوبری اینرسیایی به سراغ نحوه ی کار این سیستم در موشک های بالستیک میرویم. در موشک های بالستیک قبل از شلیک مختصات دقیق محل شلیک موشک و مختصات دقیق محل برخورد موشک(هدف) را بر حسب طول و عرض جغرافیایی در کامپیوتر موشک ذخیره میکنند. پس از شلیک موشک ژیروسکوپ ها مقدار دقیق غلط موشک در هوا و انحراف موشک به جهات مختلف را مرتبا به کامپیوتر مرکزی اعلام میکنند.
شتاب سنج ها نیز همانطور که از نامشان پیداست شتاب موشک را به کامپیوتر مرکزی اعلام میکنند. قطب نمای مغناطیسی موشک نیز ، شمال مغناطیسی را جهت یابی میکند و کار جهت یابی شمال جغرافیایی را هم ژیروسکوپ ها انجام میدهند.(داشتن موقعیت دقیق شمال جغرافیایی و شمال مغناطیسی برای دادن گرای صحیح به موشک و پرواز موشک در مسیر صحیح اهمیت زیادی دارد.)
کامپیوتر موشک نیز با در دست داشتن مختصات محل شلیک و مختصات هدف ، اطلاع از میزان غلط موشک و انحراف موشک به جهات مختلف و موقعیت شمال جغرافیایی و شمال مغناطیسی فرامین هدایتی را به بالچه های موشک ارسال میکند. البته در صورت نصب یک کیت ارتباط ماهواره ای GPS آمریکایی ، گلوناس روسی و یا بیدو چینی در درون کامپیوتر موشک ، موشک میتواند با اتصال به یک سامانه ی موقعیت یاب ماهواره ای داده های استخراجی از سیستم اینرسیایی را با داده های استخراجی از ماهواره تطابق داده و ضمن بالا بردن دقت موشک ، موشک در مسیر دقیق تری به سمت هدف پرواز کند ، زیرا همانطور که در ابتدای مقاله گفتیم سامانه های ماهواره ای نظیر GPS آمریکایی ، گلوناس روسی و بیدو چینی تنها یک مکمل برای سیستم اینرسیایی هستند زیرا امکان استفاده از سیستم اینرسیایی به تنهایی وجود دارد اما امکان استفاده از سیستم ماهواره ای به تنهایی وجود ندارد.
سیستم اینرسیایی نه تنها در موشک های بالستیک و تهاجمی کروز بلکه در موشک های کروز ضد کشتی (تا قبل از فاز ترمینال) موشک های هوا به هوای رادار فعال ، انواع کشتی ها ، هواپیماها ، جنگنده ها و… استفاده می شود.

شلیک موشک بالستیک ایرانی عماد




